産学官連携・地域連携
https://kumamoto-nct.ac.jp/cooperation/
水田除草ロボット開発プロジェクト
産学官連携・地域連携
Cooperation
水田除草ロボット開発プロジェクト
- ホーム
- 産学官連携・地域連携
- 研究プロジェクト
- 現在のプロジェクト
- 水田除草ロボット開発プロジェクト
プロジェクト期間:令和5年度~令和7年度
リーダー: MI-Gr (教授) 湯治準一郎
メンバー: MI-Gr (教授) 田中裕一、 企画運営部 (准教授) 山下徹、 CI-Gr (教授) 大塚弘文、 技術教育支援センター 技術専門員 宮本憲隆、 技術教育支援センター 技術専門職員 宮嶋久幸、 技術教育支援センター 技術専門職員 吉田圭吾
プロジェクト概要
除草作業の無人化・軽労化並びに農業機械の電気化の推進を目的とした水田内で使用する自律型の球体除草ロボットを開発します。ロボット開発は津山高専、IKOMAロボテック㈱、㈱末松電子製作所と共同で行います。
今年度の目標・活動計画
令和6年度は昨年度の課題を解決するために、球体移動ロボットの改良、土壌中の雑草の種や発芽直後のヒエ等を掘り起こす新しい外装部の試作、センサによる球体ロボットの状態把握、ビーコンを用いた自動走行プログラム開発、水田内の効果的な走行経路の探索等を行う予定です。
- 外装部の設計・試作およびビーコン制御(八代C)
- 水田内の効果的な走行経路の探索(熊本C)
- 評価機関である熊本県立大学、佐賀大学、鹿児島大学への球体ロボットの提供
- 実際の水田での実証試験
令和5年度の活動報告
【ロボットの紹介】
水田除草ロボットは、水田土壌中の雑草の種や発芽食後のヒエ等を掻き出し、水中を濁らせることを目的とした球体型で表面に突起を有するロボットです(図1)。球体ロボットは2輪駆動により、前進・後進・旋回が可能で、田植え後のある期間内に使用します(図2)。広い水田内を均等に移動しながら除草するために、ビーコンを用いた走行プログラム開発や水田内の効果的な走行経路の探索を行っています(図3)。現在は250mm球の除草ロボットを開発しています。
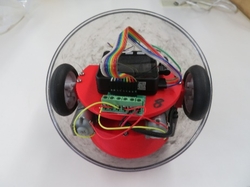 図1球体ロボット
図1球体ロボット 図2実験の様子
図2実験の様子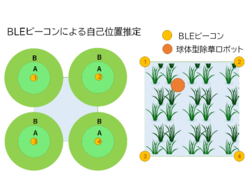 図3ビーコン制御のイメージ
図3ビーコン制御のイメージ
【主な活動実績】
(1)設計検討会:熊本県立大学 8月3日(木)
(2)ロボット開発チーム検討会:IKOMAロボテック㈱8月24日(木)
(3)水田内除草の勉強会:熊本県立大学9月12日(火)、12月27日(水)
(4)ロボット開発チーム検討会・実証実験:津山高専1月11日(木)
