産学官連携・地域連携
栗収穫ロボット開発プロジェクト
- ホーム
- 産学官連携・地域連携
- 研究プロジェクト
- 現在のプロジェクト
- 栗収穫ロボット開発プロジェクト
プロジェクト期間:令和4年度~
リーダー: MI-Gr (教授) 湯治準一郎
メンバー: MI-Gr (教授) 田中裕一、 企画運営部 (准教授) 山下徹、 技術教育支援センター 技術専門職員 宮嶋久幸、 技術教育支援センター 技術長 桐谷能生
プロジェクト概要
栗の収穫・運搬作業は機械化が進んでいません。栗園の維持には労働時間の大幅削減や軽労化が必須です。そこで、栗園における収穫・運搬・集荷作業の無人化・軽労化並びに農業機械の電気化の推進を目的とした自律型栗収穫ロボットを開発します。ロボット開発は㈱末松電子製作所と共同で行います。
今年度の目標・活動計画
イガ付き栗とイガ無栗の両方を収穫する自律型栗収穫ロボット(収穫部、荷台部、制御部から構成)の試作3号機を製作し、熊本県、茨城県などの栗園において実証実験を行います。また、展示会等のイベントにも出展し、広報活動を行う予定です。
- 収穫部、荷台部(荷下ろし機構)および自動走行システムを搭載した牽引車から構成させる試作3号機の製作(4月~7月)
- 栗園における動作実験および改良(8月~10月)
- 報告書作成(12月~1月)
令和5年度の活動報告
【ロボットの紹介】
令和5年度は2種類の栗収穫ロボットを開発し、現在は改良を続けています。一台目はイガ付栗と栗の実を同時に挟み込んで収穫する収穫機(特許取得)を引っ張りながら、収獲した栗をコンベヤでコンテナに回収するロボットです。(図1)。二台目は、ゴム板の回転により、前方で栗を跳ね上げて収穫するロボットです(図2)。この栗収穫ロボットは、図3のようにカメラで栗の木に設置したARマーカを認識し、測域センサで栗の木からの距離を確認しながら周囲を回って自律走行します。
 図1ブラシ式栗収穫ロボット
図1ブラシ式栗収穫ロボット 図2ゴム板跳ね上げ式栗収穫ロボット
図2ゴム板跳ね上げ式栗収穫ロボット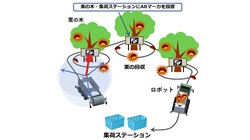 図3自立走行のイメージ
図3自立走行のイメージ
【主な活動実績】
(1)特許第7296072号「栗の収穫機」登録日:令和5年6月14日(水)
(2)実証実験・勉強会:熊本県農業研究センター球磨農業研究所9月13日(水)
(3)中間検討会・現地検討会:山江村農村環境改善センター10月16日(月)
(4)「知」の集積と活用の場産学連携協議会ポスターセッション2023:大崎ブライトコアホール11月7日(火)
(5)実証実験・スマート農業特別講義:長崎県立島原農業高校11月14日(火)
(6)アグリビジネス創出フェア2023:東京ビックサイト11月20日(月)~21日(火)
(7)農業機械マニュアル作成の勉強会:熊本県立大学12月27日(水)
※(3)と(6)は日本農業新聞に紹介されました。(5)はNHK長崎放送、島原新聞、読売新聞(地域面)で紹介されました。
令和4年度の活動報告
本研究プロジェクトでは、栗収穫機構部、収穫した栗を運搬する荷台部(電動搬送車)、制御部(自動走行制御)に分けて取り組みます。令和4年度はイガ付き栗とイガ無栗の両方を回収できる機構を考案し、特許を取得しました(特許番号:第7296072号,登録日:令和5年6月14日)。栗収穫部を牽引する荷台部は、市販の電動搬送車を参考としながら実際の圃場に適した構造、大きさのものを設計・試作しています。制御部は、ARマーカを目印として用いることで栗の木を順番に巡るプログラムを開発しました。
主な活動実績
- 設計検討会8/10(水)、中間検討会11/10(木):山江村農村環境改善センター
- 収穫方法の現地調査:茨城県笠間市8/25(木)、9/26(月)、愛媛県伊予市9/29(木)、山江村9/15(木)
- 栗ロボ試作機のデモ・意見聴取:島原農業高校8/22(月)、9/1(木)、やまえ産業振興まつり11/20(日)、JA鹿本菊鹿支所12/16(金)、JA玉名12/21(水)
- 各部試作機による動作実験および課題抽出
- 特許出願2/3(金)
出願番号:特願2023-015375
名称:栗の収穫機
出願人:独立行政法人国立高等専門学校機構、公立大学法人熊本県立大学、株式会社末松電子製作所
詳細は「栗の収穫ロボットの開発 https://kuri-robo.com/」をご覧ください。
